17/06/2009
Kinematyka to fundamentalna dziedzina mechaniki, która zajmuje się opisem ruchu ciał, całkowicie abstrahując od sił, które ten ruch wywołują. W przeciwieństwie do dynamiki, która analizuje przyczyny ruchu, kinematyka koncentruje się wyłącznie na jego geometrycznym i czasowym aspekcie. Obejmuje ona badanie takich parametrów jak położenie, prędkość, przyspieszenie oraz trajektoria obiektów w przestrzeni i czasie. Zrozumienie kinematyki jest kluczowe w wielu dziedzinach, od fizyki klasycznej po zaawansowaną inżynierię, w tym w robotyce przemysłowej, gdzie precyzja i kontrola ruchu są absolutną podstawą.

Kinematyka pozwala nam odpowiedzieć na pytania typu „gdzie obiekt się znajduje?”, „jak szybko się porusza?” i „jak zmienia się jego prędkość?”, bez zagłębiania się w to, co spowodowało dany ruch. Jest to niezwykle potężne narzędzie analityczne, umożliwiające przewidywanie i planowanie zachowania ruchomych systemów, co ma niebagatelne znaczenie w projektowaniu maszyn, pojazdów czy, co najważniejsze w kontekście współczesnego przemysłu, robotów.
Czym Jest Kinematyka? Fundament Nauki o Ruchu
Definicja i Podstawy
Jak już wspomniano, kinematyka to nauka o ruchu bez analizowania jego przyczyn. Jest to opis ruchu w czystej postaci, koncentrujący się na tym, jak obiekty przemieszczają się, obracają i zmieniają swoją orientację w czasie. Podczas gdy dynamika zajmuje się siłami i momentami, które powodują ruch, kinematyka dostarcza języka i narzędzi do jego precyzyjnego opisu. Można to porównać do mapy drogowej – kinematyka opisuje trasę i prędkość podróży, ale nie mówi nam, dlaczego ktoś wybrał tę, a nie inną drogę, ani jakie paliwo napędza pojazd.
Analiza kinematyczna zawsze odbywa się względem przyjętego układu odniesienia. Jest to swego rodzaju punkt zerowy, z którego obserwujemy ruch. Bez jasno zdefiniowanego układu odniesienia, pojęcie położenia jest bezsensowne. Układ odniesienia składa się z punktu zerowego, określonego kierunku dodatniego oraz skali (np. w metrach). To, jaki układ odniesienia wybierzemy, nie ma znaczenia – ważne jest, aby był on jasno określony i konsekwentnie stosowany w całej analizie.
Kluczowe Parametry Ruchu
W kinematyce posługujemy się kilkoma podstawowymi parametrami, które pozwalają nam w pełni opisać ruch każdego obiektu:
- Położenie (r): Określa lokalizację obiektu względem wybranego układu odniesienia w danym momencie. Może być dodatnie, ujemne lub zerowe, w zależności od wyboru układu. Jednostką położenia są metry (m).
- Prędkość (v): Określa tempo zmiany położenia obiektu w czasie. Jest to wektor, co oznacza, że ma zarówno wartość (szybkość), jak i kierunek. Może być dodatnia (ruch w kierunku dodatnim), ujemna (ruch w kierunku ujemnym) lub zerowa (spoczynek). Jednostką prędkości są metry na sekundę (m/s).
- Przyspieszenie (a): Określa tempo zmiany prędkości obiektu w czasie. Podobnie jak prędkość, jest to wielkość wektorowa. Dodatnie przyspieszenie oznacza, że zmiana prędkości jest w kierunku dodatnim, a ujemne – w kierunku ujemnym. Nie oznacza to jednak, że obiekt przyspiesza lub zwalnia! Może zwalniać, poruszając się w kierunku dodatnim, lub przyspieszać, poruszając się w kierunku ujemnym. Jednostką przyspieszenia są metry na sekundę do kwadratu (m/s²).
- Trajektoria: Jest to ścieżka, jaką przebywa poruszający się obiekt w przestrzeni. Może być prostoliniowa, krzywoliniowa, a nawet złożona, gdy ruch prostoliniowy i obrotowy występują jednocześnie.
Rola Kinematyki w Robotyce Przemysłowej
W dzisiejszym świecie, gdzie automatyzacja odgrywa coraz większą rolę w przemyśle, robotyka przemysłowa stała się motorem napędowym innowacji. A sercem każdego robota, zwłaszcza manipulatora, jest właśnie kinematyka. To ona umożliwia precyzyjne planowanie i kontrolę ruchów, co jest niezbędne do wykonywania skomplikowanych zadań.
Precyzja i Kontrola Ruchu Robotów
Roboty przemysłowe, takie jak ramiona spawalnicze, malarskie czy montażowe, muszą wykonywać zadania z niezwykłą dokładnością i powtarzalnością. Kinematyka dostarcza matematycznych modeli, które opisują, jak ruch poszczególnych przegubów robota przekłada się na położenie i orientację jego końcówki roboczej (efektora). Dzięki temu inżynierowie mogą projektować roboty zdolne do realizacji zadań, które dla człowieka byłyby zbyt nużące, niebezpieczne lub wymagałyby nadludzkiej precyzji.
Optymalizacja Procesów Produkcyjnych
Zastosowanie kinematyki pozwala na optymalizację trajektorii ruchu robotów. Oznacza to, że można zaplanować ruch w taki sposób, aby robot wykonał zadanie w jak najkrótszym czasie, zużywając przy tym minimalną ilość energii. To przekłada się bezpośrednio na większą wydajność i efektywność procesów produkcyjnych. Dzięki zaawansowanej analizie kinematycznej możliwe jest projektowanie robotów, które mogą wykonywać złożone, precyzyjne i szybkie ruchy, nawet w skomplikowanych układach przestrzennych.
Głębiej w Pojęcia Kinematyki: Położenie, Prędkość, Przyspieszenie
Aby w pełni zrozumieć ruch, musimy dokładnie zdefiniować i umieć interpretować podstawowe parametry kinematyczne.
Położenie (r): Gdzie Jesteś?
Położenie obiektu to jego lokalizacja względem precyzyjnie zdefiniowanego układu współrzędnych w określonym momencie czasu. Bez takiego układu, położenie jest pojęciem bez znaczenia. Układ współrzędnych składa się z:
- Punktu zerowego: Miejsca, od którego mierzymy wszystkie odległości.
- Kierunku dodatniego: Określonego kierunku, w którym wartości położenia rosną.
- Skali: Jednostki, w której mierzymy położenie (np. metry).
Na przykład, jeśli upuścimy przedmiot z wysokości ramienia, możemy zdefiniować układ współrzędnych, gdzie zero jest na poziomie ziemi, kierunek dodatni jest w górę, a skalą są metry. Wówczas położenie przedmiotu w każdej chwili czasu można określić liczbowo. Położenie może być dodatnie, ujemne lub zerowe, w zależności od wybranego układu.
Prędkość (v): Jak Szybko Zmienia się Twoje Położenie?
W fizyce, prędkość to tempo, w jakim zmienia się położenie. Prędkość można określić w każdej chwili czasu. Jeśli położenie zmienia się szybko, prędkość jest duża; jeśli położenie nie zmienia się wcale, prędkość wynosi zero. Matematycznie, średnia prędkość definiowana jest jako zmiana położenia podzielona przez interwał czasu.
Prędkość, podobnie jak położenie, jest ściśle związana z wybranym układem odniesienia. Dodatnia prędkość oznacza, że obiekt porusza się w kierunku dodatnim (zgodnie z definicją układu), natomiast ujemna prędkość oznacza ruch w przeciwnym kierunku. Ważne jest, aby rozróżnić prędkość (wektor) od szybkości (skalar), która jest jedynie wartością prędkości, bez uwzględniania kierunku.
Przyspieszenie (a): Jak Szybko Zmienia się Twoja Prędkość?
Przyspieszenie to tempo, w jakim zmienia się prędkość. Można je określić w każdej chwili czasu. Jeśli prędkość zmienia się szybko, przyspieszenie ma dużą wartość; jeśli prędkość się nie zmienia, przyspieszenie wynosi zero. Częstym błędem jest myślenie, że obiekt z niezerowym przyspieszeniem zawsze przyspiesza. Oznacza to jedynie, że prędkość się zmienia.
Dodatnie przyspieszenie oznacza, że zmiana prędkości wskazuje w kierunku dodatnim. Ujemne przyspieszenie oznacza, że zmiana prędkości wskazuje w kierunku ujemnym. Na przykład, jeśli obiekt zwalnia, poruszając się w kierunku dodatnim, jego przyspieszenie będzie ujemne. Jeśli przyspiesza, poruszając się w kierunku ujemnym, jego przyspieszenie również będzie ujemne. Znak przyspieszenia zależy od wybranego układu współrzędnych.
Narzędzia Analityczne Kinematyki
Opisywanie ruchu w fizyce wymaga formalnego języka i narzędzi analitycznych, które eliminują dwuznaczność. Kinematyka oferuje kilka takich narzędzi.
Diagramy Ruchu: Wizualizacja Dynamiki
Diagram ruchu to niezwykle przydatne narzędzie do wizualizacji ruchu obiektu. Można go sobie wyobrazić jako serię zdjęć zrobionych w równych odstępach czasu, na których obiekt jest przedstawiony jako kropka. Odległości między kropkami wskazują na zmianę położenia w czasie, a tym samym na prędkość obiektu. Strzałki reprezentują wektory prędkości (od kropek) i przyspieszenia (między wektorami prędkości).
Przykład: Samochód hamujący przed światłami. Na diagramie kropki będą coraz bliżej siebie (zwalnianie), a wektory prędkości będą coraz krótsze. Wektor przyspieszenia będzie wskazywał w kierunku przeciwnym do ruchu, co oznacza ujemne przyspieszenie (jeśli kierunek ruchu jest dodatni).
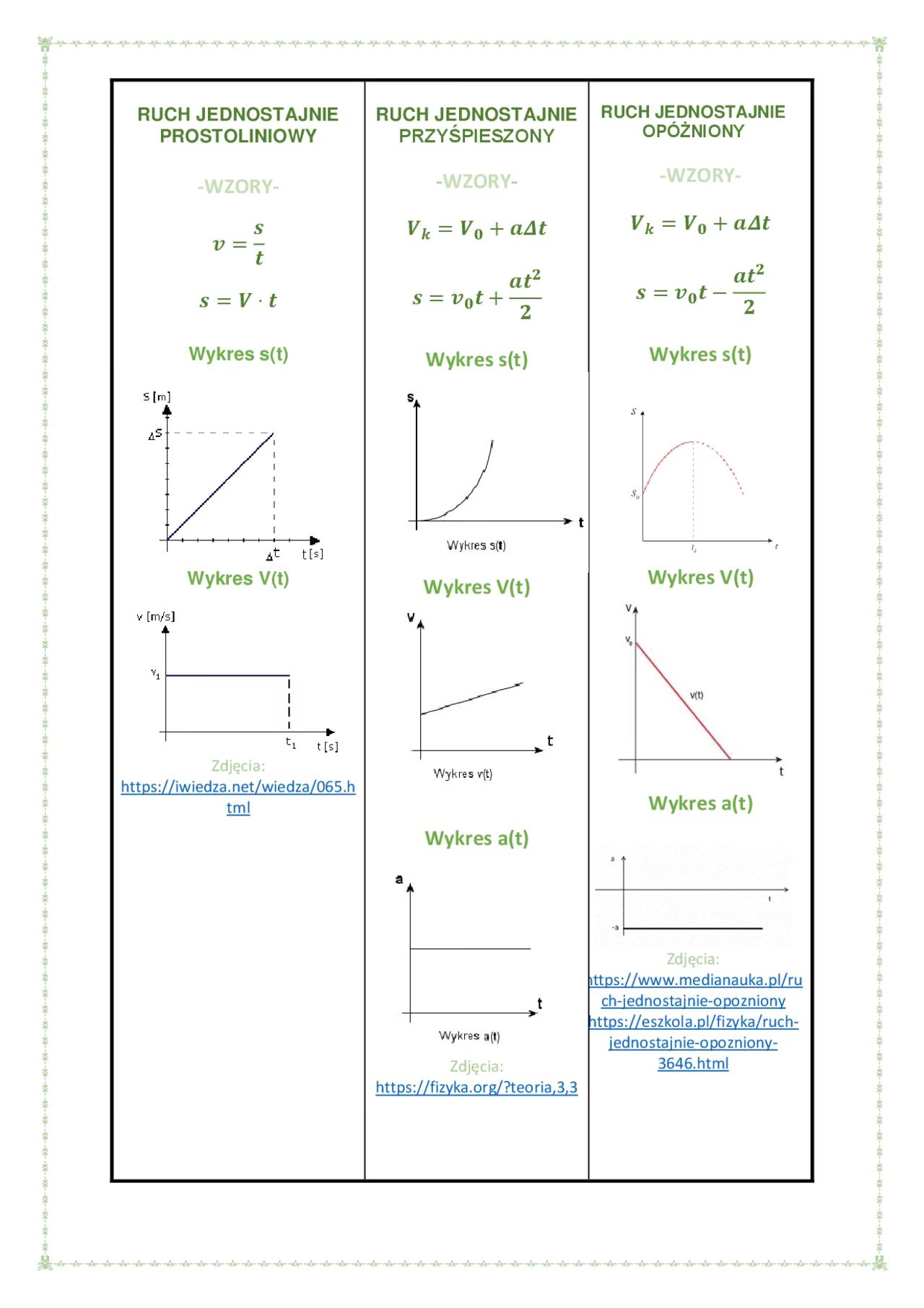
Wykresy Ruchu: Położenie, Prędkość i Przyspieszenie w Czasie
Innym potężnym narzędziem są wykresy zależności położenia, prędkości i przyspieszenia od czasu. Pozwalają one na szybką i efektywną prezentację informacji o ruchu obiektu:
- Wykres położenia od czasu (p-t): Pokazuje, jak zmienia się położenie obiektu w miarę upływu czasu. Nachylenie tego wykresu reprezentuje prędkość.
- Wykres prędkości od czasu (v-t): Przedstawia, jak zmienia się prędkość obiektu w czasie. Nachylenie tego wykresu reprezentuje przyspieszenie. Pole pod wykresem v-t odpowiada przemieszczeniu.
- Wykres przyspieszenia od czasu (a-t): Pokazuje, jak przyspieszenie zmienia się w czasie. Dla stałego przyspieszenia będzie to linia prosta, równoległa do osi czasu.
Analiza Matematyczna: Od Opisu do Obliczeń
Kinematyka wykorzystuje również zaawansowane narzędzia matematyczne, takie jak analiza wektorowa i równania ruchu. Istnieją dwie podstawowe relacje kinematyczne, które pozwalają na obliczanie nieznanych parametrów ruchu, zwłaszcza gdy przyspieszenie jest stałe:
- `v_f = v_i + a * t` (prędkość końcowa równa się prędkości początkowej plus przyspieszenie razy czas)
- `r_f = r_i + v_i * t + 0.5 * a * t^2` (położenie końcowe równa się położeniu początkowemu plus prędkość początkowa razy czas plus jedna druga przyspieszenia razy czas do kwadratu)
Gdzie: `v_f` to prędkość końcowa, `v_i` to prędkość początkowa, `a` to przyspieszenie, `t` to czas, `r_f` to położenie końcowe, `r_i` to położenie początkowe.
Przed przystąpieniem do obliczeń, kluczowe jest uporządkowanie danych w tabeli ruchu, identyfikując znane i nieznane zmienne dla różnych zdarzeń w ruchu. Analiza symboliczna, czyli wyprowadzanie ogólnych wzorów zamiast podstawiania konkretnych liczb, pozwala na zrozumienie zależności między parametrami i jest niezwykle cennym narzędziem inżynierskim.
Wskazówki: Znaki Algebraiczne i Ich Znaczenie
Częstym źródłem nieporozumień są znaki algebraiczne (+ i -). Należy pamiętać, że w fizyce znaki te opisują przede wszystkim kierunek, a nie tylko wartość. Na przykład, ujemne przyspieszenie nie oznacza, że obiekt zwalnia, ale że wektor przyspieszenia wskazuje w kierunku ujemnym. Interpretacja znaków zawsze musi być dokonana w kontekście zdefiniowanego układu odniesienia.
Kinematyka Prosta i Odwrotna: Serca Sterowania Robotami
W robotyce, zwłaszcza w kontekście ramion robotycznych, wyróżniamy dwa główne typy kinematyki, które są absolutnie kluczowe dla ich funkcjonowania:
Kinematyka Prosta (Forward Kinematics)
Kinematyka prosta polega na obliczaniu położenia i orientacji końcówki roboczej (efektora) na podstawie znanych wartości kątów lub długości poszczególnych przegubów robota. Innymi słowy, jeśli wiemy, jak ustawione są wszystkie elementy robota, kinematyka prosta pozwala nam określić, gdzie znajduje się narzędzie robota w przestrzeni.
Kinematyka Odwrotna (Inverse Kinematics)
Kinematyka odwrotna jest znacznie bardziej złożona i polega na określeniu, jakie powinny być wartości kątów lub długości przegubów robota, aby jego końcówka robocza znalazła się w zadanym miejscu i pod zadanym kątem w przestrzeni. Jest to problem trudniejszy do rozwiązania, ponieważ często istnieje wiele konfiguracji przegubów, które mogą doprowadzić efektor do tego samego punktu, a w niektórych przypadkach może nie być żadnego rozwiązania. Kinematyka odwrotna jest absolutnie niezbędna do programowania robotów, ponieważ pozwala na sterowanie nimi poprzez zadawanie pożądanych pozycji narzędzia, a nie bezpośrednio kątów przegubów.
Niezbędność Obu Typów Kinematyki
Oba typy kinematyki są nieodzowne w projektowaniu, programowaniu i sterowaniu robotami. Kinematyka prosta jest używana do symulacji i weryfikacji ruchów, natomiast kinematyka odwrotna jest podstawą dla systemów sterowania, które muszą dynamicznie dostosowywać pozycje przegubów robota, aby wykonać konkretne zadania, takie jak montaż, spawanie czy malowanie z niezwykłą precyzją.
Wpływ na Efektywność i Przyszłość Automatyzacji
Zastosowanie kinematyki wykracza daleko poza sam opis ruchu. Umożliwia ona nieustanne dążenie do doskonałości w procesach automatyzacji. Dzięki niej możliwe jest projektowanie robotów, które nie tylko wykonują złożone i precyzyjne ruchy, ale robią to w sposób optymalny pod względem czasu i zużycia energii. To bezpośrednio przekłada się na redukcję kosztów operacyjnych, zwiększenie przepustowości linii produkcyjnych i poprawę jakości finalnych produktów. Zrozumienie kinematyki jest więc niezbędne do tworzenia nowych rozwiązań automatyzacji oraz wdrażania nowoczesnych systemów robotycznych, które są zdolne do adaptacji w zmieniających się warunkach produkcyjnych.
Kinematyka w Nowoczesnych Narzędziach Inżynierskich
Rozwój kinematyki jest nierozerwalnie związany z postępem technologicznym, a zwłaszcza z dynamicznym wzrostem mocy obliczeniowej komputerów. Współczesne oprogramowanie do projektowania wspomaganego komputerowo (CAD) i inżynierii wspomaganej komputerowo (CAE) oraz zaawansowane systemy symulacyjne stały się nieocenionymi narzędziami dla inżynierów. Umożliwiają one dokładną analizę ruchu maszyn i robotów w środowisku wirtualnym, zanim zostaną one wyprodukowane.
Dzięki temu inżynierowie mogą testować i udoskonalać rozwiązania kinematyczne, optymalizować trajektorie ruchu, wykrywać potencjalne kolizje i błędy jeszcze na etapie projektowania. To znacząco zwiększa bezpieczeństwo, redukuje koszty związane z prototypowaniem i pozwala na szybsze reagowanie na zmieniające się potrzeby rynku. Symulacje kinematyczne są standardem w przemyśle, pozwalając na wirtualne wprowadzenie zmian i obserwację ich wpływu na zachowanie całego systemu, zanim zostaną zaimplementowane w rzeczywistości.
Kinematyka vs. Dynamika: Kluczowe Różnice
Choć kinematyka i dynamika są ze sobą ściśle powiązane i obie należą do mechaniki, ważne jest, aby rozróżnić ich zakres:
| Cecha | Kinematyka | Dynamika |
|---|---|---|
| Cel | Opis ruchu (jak się porusza) | Analiza przyczyn ruchu (dlaczego się porusza) |
| Główne pojęcia | Położenie, prędkość, przyspieszenie, trajektoria | Siła, masa, moment pędu, energia |
| Pytanie kluczowe | Jak obiekt się przemieszcza? | Co powoduje ruch obiektu? |
| Zastosowanie | Planowanie ruchu, projektowanie geometrii mechanizmów | Wymiarowanie elementów, analiza obciążeń, sterowanie silnikami |
| Podstawa | Geometria i czas | Prawa Newtona, zasady zachowania |
Najczęściej Zadawane Pytania (FAQ)
Czym jest teoria kinematyki?
Teoria kinematyki to zbiór zasad i równań matematycznych, które pozwalają na analizę i opis ruchu obiektów bez uwzględniania sił, które ten ruch wywołują. Obejmuje ona definicje podstawowych wielkości fizycznych, takich jak położenie, prędkość i przyspieszenie, oraz metody ich obliczania i wizualizacji w różnych układach odniesienia.
Czym jest zasada kinematyki?
Zasada kinematyki odnosi się do fundamentalnego podejścia do opisu ruchu. Głosi ona, że ruch obiektu można w pełni opisać, precyzyjnie określając jego położenie, prędkość i przyspieszenie w każdej chwili czasu, względem jasno zdefiniowanego układu odniesienia. Jest to formalny język fizyki, eliminujący niejednoznaczności w opisie zjawisk ruchowych.
Jak kinematyka pomaga w projektowaniu robotów?
Kinematyka jest kluczowa w projektowaniu robotów, ponieważ pozwala inżynierom przewidywać i kontrolować ruchy ramion i manipulatorów. Dzięki niej można określić, jak ustawić przeguby robota, aby jego końcówka narzędziowa znalazła się w dokładnie określonym miejscu i pod odpowiednim kątem. Umożliwia to precyzyjne planowanie trajektorii, optymalizację czasu cyklu i zapewnienie bezpiecznej pracy robota.
Dlaczego kinematyka nie uwzględnia sił?
Kinematyka nie uwzględnia sił, ponieważ jej celem jest wyłącznie opis geometryczny i czasowy ruchu. Analiza przyczyn ruchu (czyli sił) należy do dynamiki. Rozdzielenie tych dwóch dziedzin upraszcza proces analizy. Kinematyka dostarcza „mapy” ruchu, podczas gdy dynamika wyjaśnia „silnik” i „paliwo” potrzebne do przebycia tej mapy. To rozróżnienie pozwala na bardziej systematyczne podejście do złożonych problemów mechanicznych.
Zainteresował Cię artykuł Kinematyka: Ruch bez Sił w Robotyce i Nie Tylko? Zajrzyj też do kategorii Nauka, znajdziesz tam więcej podobnych treści!