03/03/2023
Fizyka jest nauką, która pozwala nam zrozumieć, jak działa wszechświat. Opisując zjawiska takie jak ruch obiektów, działanie sił czy rozchodzenie się fal, potrzebujemy narzędzi, które precyzyjnie oddadzą zarówno wielkość danego zjawiska, jak i jego kierunek. Właśnie w tym miejscu do gry wchodzą wektory – fundamentalne pojęcia, bez których współczesna fizyka byłaby niemożliwa do wyobrażenia. Od analizy trajektorii rakiety po obliczanie pól elektrycznych, wektory są naszymi niezawodnymi przewodnikami w świecie wielowymiarowych zjawisk.
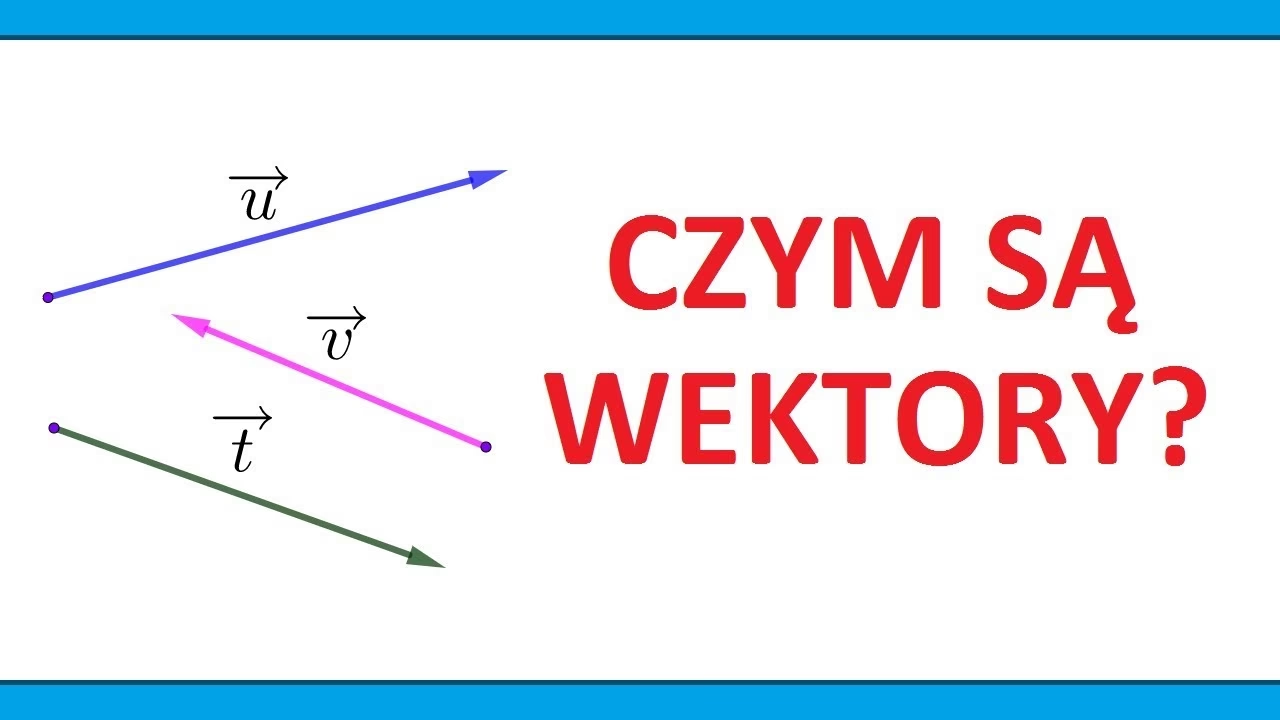
Co to jest Wektor? Podstawowa Definicja
W najprostszym ujęciu, wektorem nazywamy uporządkowaną parę punktów, gdzie jeden jest początkiem (punkt zaczepienia), a drugi końcem. Możemy sobie wyobrazić wektor jako strzałkę. Długość tej strzałki reprezentuje wielkość (moduł) wektora, natomiast jej grot wskazuje kierunek. Co ważne, wektor nie ma ustalonej pozycji – można go przesuwać równolegle do siebie, a pozostanie tym samym wektorem, pod warunkiem, że nie zmienimy jego długości ani kierunku.
Wektory są niezbędne do opisu wielu fizycznych wielkości, które oprócz wartości liczbowej, posiadają również orientację w przestrzeni. Bez wektorów nie bylibyśmy w stanie rozróżnić, czy samochód jedzie z prędkością 60 km/h na północ, czy na południe, ani czy siła pcha obiekt w przód, czy w tył.
Wektory a Skalary: Kluczowa Różnica
W fizyce i matematyce wszystkie wielkości fizyczne można podzielić na dwie główne kategorie: skalary i wektory. Rozróżnienie między nimi jest absolutnie fundamentalne dla prawidłowego opisu świata fizycznego.
Czym jest Skalar?
Skalary to wielkości fizyczne, które są w pełni opisane przez samą wielkość, czyli wartość liczbową. Nie posiadają one określonego kierunku. Przykłady skalarów to:
- Masa (np. 5 kg)
- Czas (np. 3 godziny)
- Temperatura (np. 25°C)
- Odległość (np. 10 metrów)
- Objętość (np. 1 litr)
- Energia (np. 100 J)
Podanie wartości liczbowej i jednostki w pełni charakteryzuje wielkość skalarną.
Czym jest Wektor?
Jak już wspomniano, wektory to wielkości fizyczne, które posiadają zarówno wielkość (moduł), jak i wyraźnie zdefiniowany kierunek. Aby w pełni opisać wektor, musimy podać jego wartość liczbową, jednostkę oraz kierunek, w którym działa. Przykłady wektorów to:
- Przemieszczenie (np. 5 metrów na północ)
- Prędkość (np. 60 km/h na wschód)
- Przyspieszenie (np. 9,81 m/s² w dół)
- Siła (np. 100 N w prawo)
- Pęd (np. 50 kg·m/s w kierunku ruchu)
- Waga (siła grawitacji)
- Pole elektryczne, pole magnetyczne
Tabela Porównawcza: Skalar vs. Wektor
| Cecha | Wielkość Skalarna | Wielkość Wektorowa |
|---|---|---|
| Wielkość (Moduł) | Posiada tylko wielkość. | Posiada wielkość. |
| Kierunek | Nie posiada kierunku. | Posiada kierunek. |
| Sposób opisu | Liczba i jednostka. | Liczba, jednostka i kierunek. |
| Przykłady | Masa, czas, temperatura, odległość, energia. | Przemieszczenie, prędkość, przyspieszenie, siła, pęd. |
| Zasady działania | Zwykła algebra. | Specjalne zasady algebry wektorowej. |
Działania na Wektorach: Jak Obliczać Wektory w Fizyce?
Wektory nie podlegają zwykłym zasadom dodawania czy mnożenia, jak liczby skalarne. Aby wykonywać na nich operacje, potrzebujemy specjalnych metod, które uwzględniają zarówno ich wielkość, jak i kierunek.
Dodawanie i Odejmowanie Wektorów
Metoda Graficzna (Równoległoboku lub Trójkąta)
Jedną z metod dodawania i odejmowania wektorów jest metoda graficzna. Polega ona na umieszczeniu ogonów wektorów w jednym punkcie (metoda równoległoboku) lub ogona jednego wektora przy głowie drugiego (metoda trójkąta). Suma wektorów to wektor od ogona pierwszego do głowy ostatniego. Różnica wektorów (A - B) jest równa A + (-B), gdzie -B to wektor o tej samej długości co B, ale o przeciwnym kierunku. Wynikowy wektor jest rysowany od wspólnego początku do przeciwległego wierzchołka równoległoboku lub zamyka trójkąt.
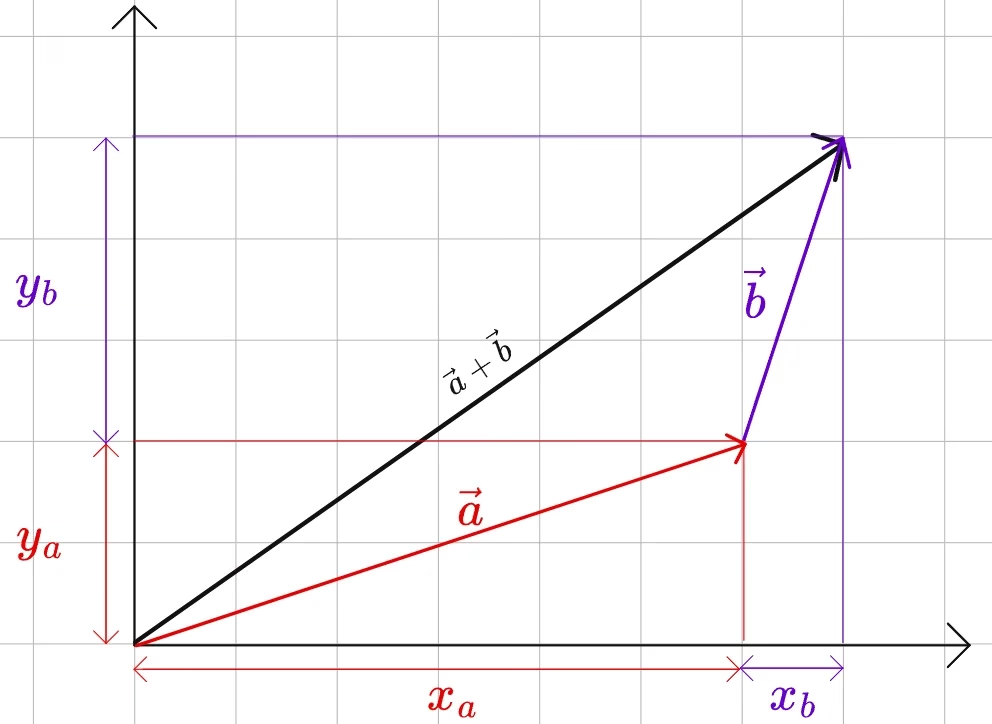
Ważną cechą dodawania wektorów jest jego przemienność (A + B = B + A) oraz łączność.
Metoda Analityczna (Rozkład na Składowe)
Najczęściej stosowaną i najbardziej precyzyjną metodą dodawania i odejmowania wektorów jest metoda analityczna, która polega na rozkładzie wektorów na składowe w kartezjańskim układzie współrzędnych (np. x, y, z). Każdy wektor A można zapisać jako sumę jego składowych: A = Axi + Ayj + Azk, gdzie i, j, k to wektory jednostkowe wzdłuż osi x, y, z. Aby dodać dwa wektory A i B, wystarczy dodać ich odpowiednie składowe:
Rx = Ax + Bx
Ry = Ay + By
Rz = Az + Bz
Wektor wynikowy R będzie wtedy R = Rxi + Ryj + Rzk. Podobnie odejmujemy wektory, odejmując ich składowe. Ta metoda jest niezwykle potężna, ponieważ pozwala precyzyjnie obliczać sumy wielu wektorów, co jest kluczowe w złożonych problemach fizycznych.
Mnożenie Wektora przez Skalar
Mnożenie wektora przez skalar (liczbę) zmienia jego wielkość, ale nie zmienia jego kierunku, chyba że skalar jest ujemny – wtedy kierunek wektora zostaje odwrócony. Na przykład, jeśli pomnożymy wektor prędkości v przez skalar 2, otrzymamy wektor 2v, który ma dwukrotnie większą prędkość, ale ten sam kierunek. Jeśli pomnożymy przez -1, otrzymamy wektor -v, który ma tę samą prędkość, ale przeciwny kierunek.
Iloczyny Wektorów
Wyróżniamy dwa główne typy mnożenia wektorów, które dają różne typy wyników:
- Iloczyn skalarny (zwany też iloczynem punktowym lub dot product): Wynikiem jest skalar. Jest on miarą tego, jak bardzo dwa wektory są równoległe. Oblicza się go jako iloczyn modułów wektorów i cosinusa kąta między nimi. Jest używany np. do obliczania pracy w fizyce (W = F · d = |F||d|cosθ).
- Iloczyn wektorowy (zwany też iloczynem krzyżowym lub cross product): Wynikiem jest inny wektor. Ten nowy wektor jest prostopadły (ortogonalny) do płaszczyzny utworzonej przez dwa oryginalne wektory. Jego kierunek określa się za pomocą reguły prawej dłoni. Moduł iloczynu wektorowego jest równy iloczynowi modułów wektorów i sinusa kąta między nimi. Jest stosowany np. do obliczania momentu siły czy siły Lorentza w magnetyzmie.
Warto również wspomnieć, że w algebrze wektorowej nie istnieje operacja odpowiadająca dzieleniu przez wektor.
Wektor Jednostkowy
Wektor jednostkowy to wektor o module równym jeden, który służy wyłącznie do określania kierunku. Jest bezwymiarowy (nie ma jednostek). Aby znaleźć wektor jednostkowy V̂ dla dowolnego wektora V→, wystarczy podzielić wektor przez jego moduł: V̂ = V→ / |V→|. Wektory jednostkowe osi (i, j, k) są doskonałymi przykładami wektorów jednostkowych.
Wektor Zerowy
Wektor zerowy (oznaczany jako 0→) to wektor, którego wszystkie składowe są równe zero. Nie ma on długości ani określonego kierunku. Jest ważny w rachunku wektorowym, np. gdy różnica dwóch równych wektorów wynosi zero.

Praktyczne Zastosowania Wektorów w Fizyce
Wektory są absolutnie fundamentalne w niemal każdej dziedzinie fizyki. Oto kilka kluczowych obszarów, gdzie ich zastosowanie jest nieodzowne:
- Kinematyka: Opis ruchu obiektów. Przemieszczenie (zmiana pozycji), prędkość (tempo zmiany przemieszczenia) i przyspieszenie (tempo zmiany prędkości) to klasyczne przykłady wielkości wektorowych. Bez nich nie bylibyśmy w stanie przewidzieć trajektorii pocisku, czy określić, gdzie znajdzie się spadający obiekt po danym czasie.
- Dynamika: Badanie przyczyn ruchu, czyli sił. Siła jest wielkością wektorową – ma wielkość (np. w Newtonach) i kierunek. Sumowanie sił (dodawanie wektorowe) pozwala obliczyć siłę wypadkową działającą na ciało, co z kolei, zgodnie z drugą zasadą dynamiki Newtona, determinuje jego przyspieszenie.
- Elektryczność i Magnetyzm: Pola elektryczne i magnetyczne są z natury wektorowe. W każdym punkcie przestrzeni mają określoną wielkość i kierunek. Obliczanie wypadkowego pola od wielu źródeł wymaga wektorowego sumowania poszczególnych pól. Siła Lorentza, działająca na ładunek w polu magnetycznym, jest również przykładem wielkości wektorowej, często obliczanej za pomocą iloczynu wektorowego.
- Mechanika płynów: Prędkość przepływu płynu w różnych punktach rurociągu jest wektorem, tak samo jak siły lepkości czy ciśnienia działające na powierzchnie.
- Optyka: Polaryzacja światła może być opisana za pomocą wektorów, podobnie jak kierunek rozchodzenia się światła.
Przykładowe Obliczenia Wektorowe
Rozwiązywanie problemów fizycznych z użyciem wektorów często sprowadza się do ich rozkładu na składowe i analitycznego sumowania lub odejmowania. Poniżej przedstawiamy przykłady typowych zastosowań.
Przykład 1: Kierunek Ruchu (odwrót oddziału)
Wyobraźmy sobie oddział żołnierzy poruszający się z prędkością v→ = (4,0 km/h)i + (3,0 km/h)j + (0,1 km/h)k, gdzie i to wschód, j to północ, a k to wysokość. Jeśli oddział ma się wycofać (odwrót), oznacza to, że musi poruszać się w kierunku przeciwnym do obecnego. Wektor nowej prędkości u→ będzie więc ujemnością wektora v→, czyli u→ = -v→. W praktyce oznacza to, że wszystkie składowe wektora prędkości zmienią znak na przeciwny. Jeśli pierwotnie poruszali się na wschód i północ oraz w górę, po odwrócie będą poruszać się na zachód i południe oraz w dół, zachowując te same wartości prędkości wzdłuż osi. Analityczne podejście pozwala precyzyjnie określić nowy kierunek.
Przykład 2: Obliczanie Sumy i Różnicy Wektorów
Mamy trzy wektory A, B, C o znanych modułach i kątach. Aby znaleźć ich sumę R→ = A→ + B→ + C→ lub różnicę D→ = A→ - B→, postępujemy analitycznie. Najpierw każdy wektor rozkładamy na jego składowe (Ax, Ay; Bx, By itd.) używając funkcji trygonometrycznych (cosinus dla składowej x, sinus dla składowej y). Następnie, aby znaleźć składowe wektora wynikowego R, dodajemy (lub odejmujemy) odpowiednie składowe wszystkich wektorów. Na przykład, Rx = Ax + Bx + Cx i Ry = Ay + By + Cy. Moduł wektora wynikowego obliczamy z twierdzenia Pitagorasa: |R→| = √(Rx² + Ry²). Kąt kierunku obliczamy z funkcji tangens: θ = arctan(Ry/Rx). Ta metoda gwarantuje znacznie większą precyzję niż rysowanie.
Przykład 3: Psi Zabawa (równowaga sił)
Cztery psy ciągną zabawkę, każdy z inną siłą i w innym kierunku. Zabawka pozostaje w miejscu, co oznacza, że suma wszystkich działających na nią sił (wektorów sił) musi być równa wektorowi zerowemu. Jeśli znamy siły trzech psów (A, B, C), możemy obliczyć ich wektorową sumę R→ = A→ + B→ + C→. Siła D→, z jaką ciągnie czwarty pies (Dingo), musi być wektorem równoważącym R→, czyli D→ = -R→. Oznacza to, że Dingo musi ciągnąć z siłą o tej samej wielkości co wektor R, ale w dokładnie przeciwnym kierunku. Rozkładając siły psów na składowe, sumując je i zmieniając znak, precyzyjnie określamy siłę i kierunek, z jaką ciągnie Dingo.
Przykład 4: Przemieszczenie Narciarza
Narciarz porusza się kolejno: 5,0 km na północ, 3,0 km na zachód, a następnie 4,0 km na południowy zachód. Aby znaleźć jego całkowite przemieszczenie od stacji początkowej, traktujemy każdy odcinek trasy jako osobny wektor przemieszczenia (D1, D2, D3). Rozkładamy każdy z nich na składowe x i y (np. północ to +y, zachód to -x, południowy zachód to -x i -y). Następnie sumujemy wszystkie składowe x razem i wszystkie składowe y razem, aby uzyskać całkowite składowe przemieszczenia Dx i Dy. Wektor całkowitego przemieszczenia to D→ = Dxi + Dyj. Aby wrócić do stacji najkrótszą drogą, narciarz musi pokonać wektor -D→, czyli wektor o tej samej długości, ale przeciwnym kierunku. Obliczenie modułu i kąta tego wektora da nam dystans i kierunek powrotu.
Dlaczego Wektory Są Tak Ważne?
Wektory to nie tylko abstrakcyjne narzędzia matematyczne, ale kluczowy język fizyki. Pozwalają nam na:
- Precyzyjny opis: Umożliwiają dokładne przedstawienie wielkości, które mają zarówno wartość, jak i kierunek, co jest niezbędne w świecie trójwymiarowym.
- Rozwiązywanie złożonych problemów: Dzięki analitycznym metodom rozkładu na składowe, możemy efektywnie sumować i odejmować wiele wektorów, co pozwala analizować skomplikowane układy sił, ruchów czy pól.
- Zrozumienie fundamentalnych praw: Wiele praw fizyki (np. zasady dynamiki Newtona, prawa elektromagnetyzmu Maxwella) jest formułowanych w języku wektorowym, co świadczy o ich fundamentalnym znaczeniu.
Bez wektorów fizyka byłaby znacznie uboższa i mniej precyzyjna. Są one fundamentem, na którym opiera się większość współczesnych teorii i zastosowań, od inżynierii po astronomię.
Najczęściej Zadawane Pytania (FAQ)
1. Czy wektor może mieć tylko kierunek, bez wielkości?
Nie, wektor z definicji musi posiadać zarówno wielkość (moduł), jak i kierunek. Nawet wektor jednostkowy, który służy do określania kierunku, ma moduł równy jeden. Jedynym wyjątkiem jest wektor zerowy, który ma moduł zero i nie ma określonego kierunku.
2. Czy czas jest wektorem?
Nie, czas jest wielkością skalarną. Jest w pełni opisany przez swoją wielkość (np. 5 sekund) i nie posiada kierunku w przestrzeni. Oczywiście, czas płynie w jednym kierunku (od przeszłości do przyszłości), ale w kontekście wektorów przestrzennych w fizyce, nie jest traktowany jako wektor.
3. Jakie są główne metody dodawania wektorów?
Główne metody to:
- Metoda graficzna: Rysowanie wektorów i łączenie ich za pomocą metody trójkąta (ogon do głowy) lub równoległoboku (wspólny ogon). Jest intuicyjna, ale mniej precyzyjna.
- Metoda analityczna: Rozkładanie wektorów na składowe w kartezjańskim układzie współrzędnych (x, y, z) i dodawanie lub odejmowanie odpowiednich składowych. Jest to metoda najbardziej precyzyjna i powszechnie stosowana w obliczeniach fizycznych.
4. Czy wektor zerowy ma kierunek?
Nie, wektor zerowy ma moduł równy zero i nie ma określonego kierunku. Można go postrzegać jako punkt w przestrzeni, który nie wskazuje żadnego konkretnego kierunku.
5. Kto opracował nowoczesną koncepcję wektorów?
Nowoczesna forma rachunku wektorowego, jaką znamy dzisiaj, została rozwinięta pod koniec XIX wieku przez niezależnie działających matematyków i fizyków: Josiaha Willarda Gibbsa ze Stanów Zjednoczonych oraz Olivera Heaviside’a z Anglii. Ich prace były kluczowe dla wyrażenia nowych praw elektromagnetyzmu, sformułowanych przez Jamesa Clerka Maxwella.
Opanowanie koncepcji wektorów jest kluczowe dla każdego, kto chce zgłębić tajniki fizyki. Zrozumienie ich natury, zasad działania i sposobów obliczeń otwiera drzwi do głębszego poznania otaczającego nas świata.
Zainteresował Cię artykuł Wektory w Fizyce: Kompletny Przewodnik? Zajrzyj też do kategorii Fizyka, znajdziesz tam więcej podobnych treści!