20/05/2007
W świecie fizyki, sprężystość jest fundamentalną właściwością wielu materiałów, która pozwala im wracać do pierwotnego kształtu po usunięciu działającej na nie siły. Zjawisko to jest wszechobecne w naszym codziennym życiu – od gumek recepturek, przez amortyzatory samochodowe, aż po zaawansowane konstrukcje inżynierskie. Zrozumienie zasad rządzących sprężystością, siłą sprężystości oraz energią z nią związaną jest kluczowe dla każdego, kto zgłębia tajniki mechaniki.
Czym jest sprężystość i Prawo Hooke'a?
Podstawą zrozumienia sprężystości jest Prawo Hooke'a, które opisuje zależność między siłą działającą na ciało a jego odkształceniem. Prawo to głosi, że odkształcenie ciała pod wpływem działającej na nie siły jest proporcjonalne do tej siły, o ile odkształcenie nie przekracza pewnej granicy sprężystości. Matematycznie, dla prostych przypadków, takich jak rozciąganie lub ściskanie sprężyny, Prawo Hooke'a wyraża się wzorem:
F = kΔL
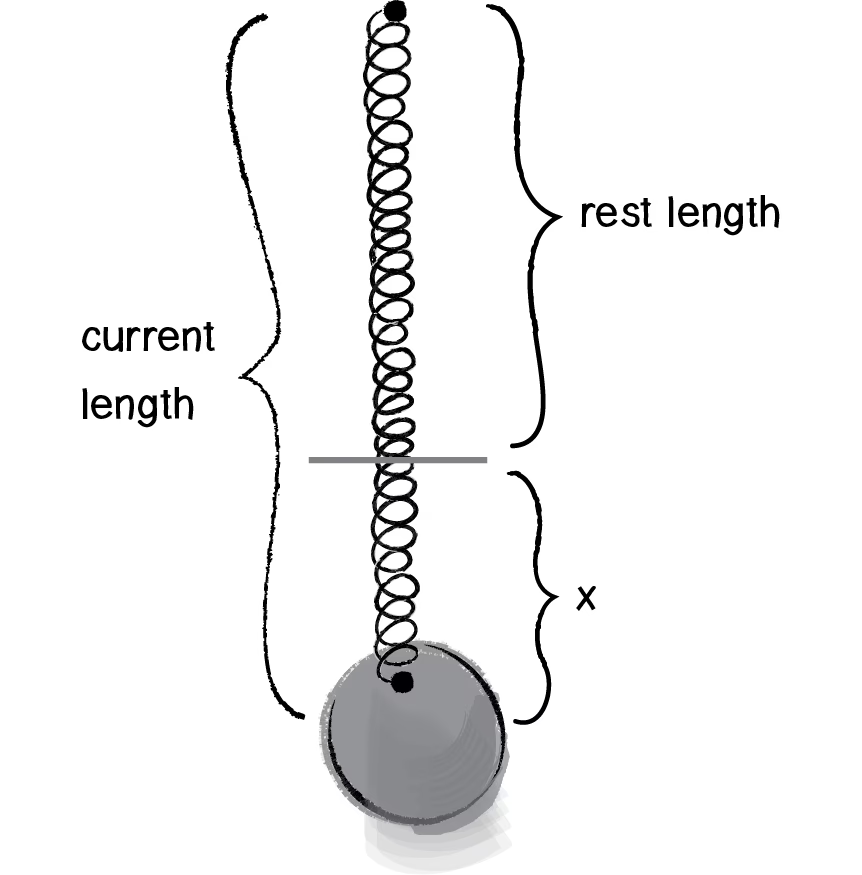
Gdzie F to siła sprężystości, k to współczynnik sprężystości (zwany również stałą sprężystości), a ΔL to zmiana długości (wydłużenie lub skrócenie) sprężyny. Warto zauważyć, że wzór ten opisuje wielkość siły potrzebnej do wywołania danego odkształcenia. Siła sprężystości, która dąży do przywrócenia pierwotnego kształtu, działa zawsze w kierunku przeciwnym do wektora odkształcenia.
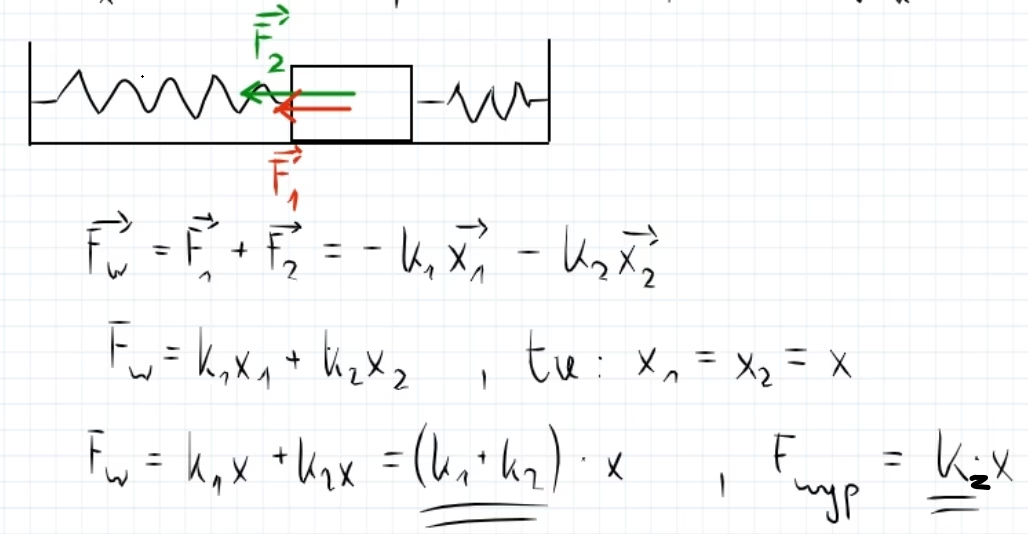
Siła sprężystości, często oznaczana jako Fx w kontekście ruchu harmonicznego, ma również swoje szczególne wyrażenie:
Fx = -kx
Tutaj k jest współczynnikiem sprężystości sprężyny, a x to jej wychylenie z położenia równowagi. Znak minus wskazuje, że siła sprężystości jest zawsze skierowana przeciwnie do kierunku wychylenia. Oznacza to, że jeśli sprężyna jest rozciągnięta (x > 0), siła sprężystości działa w kierunku ujemnym, dążąc do ściśnięcia sprężyny. Jeśli sprężyna jest ściśnięta (x < 0), siła sprężystości działa w kierunku dodatnim, dążąc do jej rozciągnięcia. Ta zależność sprawia, że siła sprężystości jest siłą harmoniczną, co prowadzi do drgań harmonicznych w układach takich jak ciężarek na sprężynie.
Współczynnik sprężystości – co go determinuje?
Współczynnik sprężystości k jest unikalną cechą każdego sprężystego obiektu i zależy od wielu czynników. W przypadku sprężyny spiralnej, jego wartość wynika z właściwości materiału, z którego jest wykonana, oraz z jej geometrii. Wzór na współczynnik sprężystości sprężyny, uwzględniający te cechy, jest następujący:
k = Gr^4 / (4NR^3)
Gdzie:
Gto moduł sztywności materiału (jednostka: N/m²), który charakteryzuje opór materiału na odkształcenia ścinające.rto promień drutu, z którego wykonana jest sprężyna.Nto liczba zwojów sprężyny.Rto promień sprężyny (promień zwojów).
Z tego wzoru jasno wynika, że współczynnik sprężystości jest większy dla sprężyn wykonanych z materiałów o wysokim module sztywności (twardych), z grubszego drutu (większe r), o mniejszej liczbie zwojów (mniejsze N) i o mniejszym promieniu zwojów (mniejsze R). Intuicyjnie, twardsza, krótsza i bardziej „zwarta” sprężyna będzie trudniejsza do odkształcenia, co oznacza większe k.
Praca siły sprężystości i energia potencjalna sprężystości
Kiedy rozciągamy lub ściskamy sprężynę, wykonujemy pracę. Ta praca nie znika – zostaje zmagazynowana w sprężynie w postaci energii potencjalnej sprężystości. Aby zrozumieć, jak to działa, rozważmy ciężarek na sprężynie, poruszający się po gładkiej poziomej płaszczyźnie. Gdy rozciągamy sprężynę, równoważymy siłę sprężystości, która przeciwdziała wydłużaniu. Wykonana praca jest równa iloczynowi siły i przemieszczenia, jednak w przypadku sprężyny siła nie jest stała.
Praca wykonana przez stałą siłę vs. zmienną siłę
Dla stałej siły F, praca W wykonana przy przesunięciu ciała o Δx wynosi po prostu:
W = F · Δx
Graficznie, praca ta odpowiada polu prostokąta pod wykresem siły w funkcji położenia. Jednakże, siła sprężystości nie jest stała; jej wartość zależy liniowo od wydłużenia sprężyny (F = kx). Oznacza to, że wraz ze wzrostem wydłużenia, rośnie również siła potrzebna do dalszego rozciągania.
Aby obliczyć pracę wykonaną przez siłę sprężystości, musimy posłużyć się metodą sumowania. Wyobraźmy sobie, że odcinek, o który rozciągamy sprężynę, dzielimy na bardzo małe fragmenty. W każdym takim fragmencie możemy przyjąć, że siła jest w przybliżeniu stała. Praca wykonana w każdym małym fragmencie byłaby równa polu małego prostokąta. Suma pól tych wszystkich prostokątów przybliża pole pod wykresem siły w funkcji wydłużenia.
W przypadku siły sprężystości, wykres zależności wartości siły od wydłużenia jest linią prostą, przechodzącą przez początek układu współrzędnych. Praca wykonana przez siłę zewnętrzną, która równoważy siłę sprężystości, jest więc równa polu trójkąta prostokątnego, którego wysokość wynosi F = kx, a podstawa to x (wydłużenie sprężyny).
Zatem praca W wykonana podczas rozciągania sprężyny od jej położenia równowagi do wydłużenia x wynosi:
W = 1/2 · x · F = 1/2 · x · (k · x) = k · x^2 / 2
Ta wykonana praca zostaje zmagazynowana w postaci energii potencjalnej sprężystości (Ep). Możemy ją zatem przedstawić jako kwadratową funkcję wydłużenia sprężyny:
Ep = k · x^2 / 2
Gdzie k to współczynnik sprężystości sprężyny, a x to jej wydłużenie (lub skrócenie). W układzie SI jednostką energii jest dżul [J].
Wykres energii potencjalnej sprężystości
Ponieważ energia potencjalna sprężystości jest proporcjonalna do kwadratu wydłużenia (x^2), jej wykres w funkcji wydłużenia jest parabolą. Ważne jest, że wydłużenie x może przyjmować zarówno wartości dodatnie (rozciąganie), jak i ujemne (ściskanie sprężyny). Wykres energii potencjalnej jest symetryczny względem osi rzędnych, ponieważ zarówno rozciągnięcie, jak i ściśnięcie sprężyny o tę samą wartość x, magazynuje tę samą ilość energii. W położeniu równowagi (x = 0), energia potencjalna sprężystości jest równa zeru. Maksymalna energia jest magazynowana przy maksymalnym wydłużeniu lub skróceniu sprężyny, co w kontekście drgań harmonicznych nazywamy amplitudą drgań.
Przykłady zastosowania i obliczeń
Aby lepiej zrozumieć te zależności, przeanalizujmy kilka przykładów:
Przykład 1: Porównanie energii w różnych sprężynach
Rozważmy dwie sprężyny o różnych współczynnikach sprężystości:
- Sprężyna 1:
k1 = 100 N/m - Sprężyna 2:
k2 = 50 N/m
Przyjmijmy, że maksymalne wydłużenie obu sprężyn wynosi 0.1 m.
Obliczmy energię potencjalną dla obu sprężyn przy maksymalnym wydłużeniu:
Dla Sprężyny 1:
Ep1 = (100 N/m) * (0.1 m)^2 / 2 = 100 * 0.01 / 2 = 1 J / 2 = 0.5 J
Dla Sprężyny 2:
Ep2 = (50 N/m) * (0.1 m)^2 / 2 = 50 * 0.01 / 2 = 0.5 J / 2 = 0.25 J
Jak widać, przy tym samym wydłużeniu, sprężyna o większej stałej sprężystości (k1 = 100 N/m) magazynuje dwukrotnie więcej energii niż sprężyna o mniejszej stałej sprężystości (k2 = 50 N/m). To pokazuje, że „twardsze” sprężyny są w stanie zmagazynować więcej energii mechanicznej przy tym samym odkształceniu.
Poniższa tabela przedstawia wartości energii potencjalnej dla różnych wydłużeń dla obu sprężyn:
| Wydłużenie x [m] | Ep1 (k=100 N/m) [J] | Ep2 (k=50 N/m) [J] |
|---|---|---|
| 0.0 | 0.00 | 0.00 |
| 0.025 | 0.03125 | 0.015625 |
| 0.05 | 0.125 | 0.0625 |
| 0.075 | 0.28125 | 0.140625 |
| 0.1 | 0.50 | 0.25 |
Przykład 2: Zależność energii potencjalnej od czasu w oscylatorze harmonicznym
W ruchu harmonicznym, wychylenie x zmienia się w czasie zgodnie z funkcją sinusoidalną:
x(t) = A sin(ωt) = A sin(2πft)
Gdzie A to amplituda drgań, ω to częstość kołowa (ω = 2πf), a f to częstotliwość drgań.
Podstawiając to do wzoru na energię potencjalną sprężystości, otrzymujemy:
Ep(t) = k * (A sin(2πft))^2 / 2 = k A^2 sin^2(2πft) / 2
Wiemy również, że w ruchu harmonicznym, stała sprężystości k jest związana z masą oscylatora m i częstością kołową ω wzorem:
k = mω^2 = m(2πf)^2 = 4π^2 f^2 m
Podstawiając to do wzoru na Ep(t), otrzymujemy zależność energii potencjalnej sprężystości od czasu:
Ep(t) = (4π^2 f^2 m) * A^2 sin^2(2πft) / 2 = 2π^2 f^2 m A^2 sin^2(2πft)
Dla danych z przykładu: A = 0.2 m, f = 2 Hz, m = 0.1 kg:
Ep(t) = 2π^2 * (2 Hz)^2 * (0.1 kg) * (0.2 m)^2 * sin^2(2π * 2 Hz * t)
Ep(t) = 2π^2 * 4 * 0.1 * 0.04 * sin^2(4πt)
Ep(t) ≈ 0.3158 * sin^2(4πt) J
Przybliżając, otrzymujemy:
Ep(t) ≈ 0.32 * sin^2(4πt) J
Wykres zależności energii potencjalnej od czasu dla oscylatora harmonicznego pokazuje, że energia potencjalna osiąga wartość maksymalną dwukrotnie w ciągu jednego okresu drgań. Dzieje się tak, gdy wychylenie jest równe amplitudzie (maksymalne rozciągnięcie lub ściśnięcie) oraz gdy wychylenie jest równe minimalnemu (maksymalne ściśnięcie). W położeniu równowagi (x=0), energia potencjalna jest zerowa, a cała energia jest przekształcona w energię kinetyczną.
Najczęściej zadawane pytania (FAQ)
Jak obliczyć sprężystość?
Pojęcie „obliczenia sprężystości” może odnosić się do kilku aspektów. Najczęściej chodzi o obliczenie siły sprężystości lub współczynnika sprężystości:
- Siła sprężystości (F): Obliczamy ją zazwyczaj za pomocą Prawa Hooke'a:
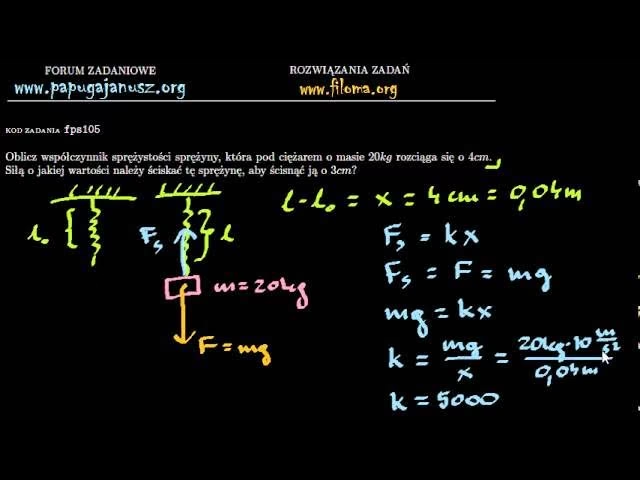
F = kΔL. Potrzebujemy znać współczynnik sprężystościkoraz zmianę długościΔL(wydłużenie lub skrócenie). - Współczynnik sprężystości (k): Jeśli znamy siłę
F, która spowodowała dane wydłużenieΔL, możemy go obliczyć jakok = F / ΔL. Dla sprężyn spiralnych, współczynnikkzależy od parametrów geometrycznych i materiałowych:k = Gr^4 / (4NR^3). - Energia potencjalna sprężystości (Ep): Obliczamy ją ze wzoru
Ep = kx^2 / 2, gdziexto wydłużenie lub skrócenie.
Jaki jest wzór na siłę sprężystości?
Wzór na siłę sprężystości to Fx = -kx. Ten wzór jest kluczowy w opisie ruchu harmonicznego, gdzie k jest współczynnikiem sprężystości sprężyny, a x to wychylenie z położenia równowagi. Znak minus wskazuje, że siła sprężystości działa zawsze w kierunku przeciwnym do kierunku wychylenia. Na przykład, jeśli sprężyna jest rozciągnięta w prawo, siła sprężystości działa w lewo, dążąc do przywrócenia równowagi. Współczynnik k zależy od grubości drutu, średnicy zwojów, długości sprężyny i rodzaju materiału.
Jaka jest praca siły sprężystości?
Praca wykonana przez siłę sprężystości (lub siłę zewnętrzną równoważącą siłę sprężystości) podczas odkształcania sprężyny jest równa zmianie jej energii potencjalnej sprężystości. Ponieważ siła sprężystości nie jest stała, praca nie jest prostym iloczynem siły i przemieszczenia. Zamiast tego, oblicza się ją jako pole pod wykresem siły w funkcji przemieszczenia, które dla sprężyny przyjmuje kształt trójkąta. Ostatecznie, praca ta jest równa energii potencjalnej sprężystości zgromadzonej w sprężynie i wyraża się wzorem:
W = Ep = kx^2 / 2
Gdzie k to współczynnik sprężystości, a x to wydłużenie lub skrócenie sprężyny.
Ile wynosi współczynnik sprężystości?
Współczynnik sprężystości k jest stałą charakteryzującą konkretną sprężynę lub ciało sprężyste. Jego wartość nie jest stała dla wszystkich obiektów, lecz zależy od cech fizycznych danego ciała. Dla sprężyny, współczynnik k zależy od modułu sztywności materiału G, promienia drutu r, liczby zwojów N oraz promienia sprężyny (zwojów) R. Konkretny wzór na k dla sprężyny spiralnej to k = Gr^4 / (4NR^3). Oznacza to, że jego wartość jest unikalna dla każdej sprężyny, co ilustrują przykłady, gdzie dla dwóch różnych sprężyn podano k1 = 100 N/m i k2 = 50 N/m. Jednostką współczynnika sprężystości w układzie SI jest Newton na metr [N/m].
Zainteresował Cię artykuł Sprężystość: Siła, Praca i Energia Potencjalna", "kategoria": "Fizyka? Zajrzyj też do kategorii Edukacja, znajdziesz tam więcej podobnych treści!